Vidoc + Pix4Dcatch 성능 테스트
Pix4D사에서 새로 출시된 vidoc과 Pix4Dcatch의 호환성을 살펴보고 향후 현장에서 함께 사용이 가능한지 테스트를 진행하였습니다. 주변에서 쉽게 볼 수 있는 조형물을 촬영하여 실제 조형물과 Vidoc과 Pix4D를 통해 얻은 데이터 값의 차이점이 없는지 확인하는 것을 목표로 하는 프로젝트 입니다.
내용 및 결과
GPS는 위성으로부터 우리의 위치정보를 수신받는 서비스입니다. 하지만 GPS도 오차가 있는데 오차가 심하면 최대 미터단위의 오차가 발생할 수도 있습니다. 따라서 이를 보완하기 위해 RTK서비스가 나왔습니다. RTK서비스란 위치신호를 위성과 지상 기지국으로 부터 수신하면서 오차범위를 센티미터로 줄이는 서비스입니다. RTK서비는 주로 위치정보가 중요한 측량업계에서 사용이 됩니다.
 Pix4D catch는 모바일 장치로 사용하는 소프트웨어이기 때문에 GPS신호만 수신할 수 있었습니다. 하지만 최근 Vidoc이 출시되면서 Pix4D catch도 RTK신호로 촬영이 가능해졌습니다. 따라서 우리는 Vidoc이 과연 RTK신호를 잘 잡을 수 있는지, Pix4D catch는 어떻게 활용 할 수 있는지 테스트를 해보기로 하였습니다. RTK신호는 일종의 전파 신호를 수신받는 것이기 때문에 건물이 밀집해 있는 지역에서는 수신이 어려울 수도 있습니다. 따라서 우리는 건물이 밀집해 있는 지역과 공원같은 탁 트인 환경에서 테스트를 해보았습니다. 결과는 밑의 사진처럼 건물이 밀집해 있는 지역에서는 RTK Float1이 되고 탁 트인 환경에서는 RTK Fixed2가 되었습니다. 따라서 Vidoc은 일반 RTK드론처럼 RTK신호의 수신이 이루어진다는 결과를 얻었습니다.
Pix4D catch는 모바일 장치로 사용하는 소프트웨어이기 때문에 GPS신호만 수신할 수 있었습니다. 하지만 최근 Vidoc이 출시되면서 Pix4D catch도 RTK신호로 촬영이 가능해졌습니다. 따라서 우리는 Vidoc이 과연 RTK신호를 잘 잡을 수 있는지, Pix4D catch는 어떻게 활용 할 수 있는지 테스트를 해보기로 하였습니다. RTK신호는 일종의 전파 신호를 수신받는 것이기 때문에 건물이 밀집해 있는 지역에서는 수신이 어려울 수도 있습니다. 따라서 우리는 건물이 밀집해 있는 지역과 공원같은 탁 트인 환경에서 테스트를 해보았습니다. 결과는 밑의 사진처럼 건물이 밀집해 있는 지역에서는 RTK Float1이 되고 탁 트인 환경에서는 RTK Fixed2가 되었습니다. 따라서 Vidoc은 일반 RTK드론처럼 RTK신호의 수신이 이루어진다는 결과를 얻었습니다.
 건물 밀집 지역 |  탁 트인 환경 |
HDOP
*HDOP는 Horizonal Dilution of Precision 의 약자로서, '수평좌표의 위치 정밀도를 방해하는 정도 : 수평위치 정밀도 저하율'이라고 할 수 있습니다. 물론 그 수치가 적을수록 위치 좌표의 정확성은 높아집니다.
Project 1

Vidoc이 잘 작동을 하는지 확인한 우리는 이제 Pix4D catch의 활용방안을 찾기위해 테스트를 진행하였습니다. 첫번째로, 간단한 조형물에 대한 모델링 테스트를 진행하였습니다. 모델링 대상이 된 조형물은 회사 건물 근처에 있는 볼링핀 모양의 조형물로 선택하였고 Pix4D catch를 이용하여 130장의 사진을 촬영한 후 Pix4D mapper를 이용하여 후처리를 하였습니다.
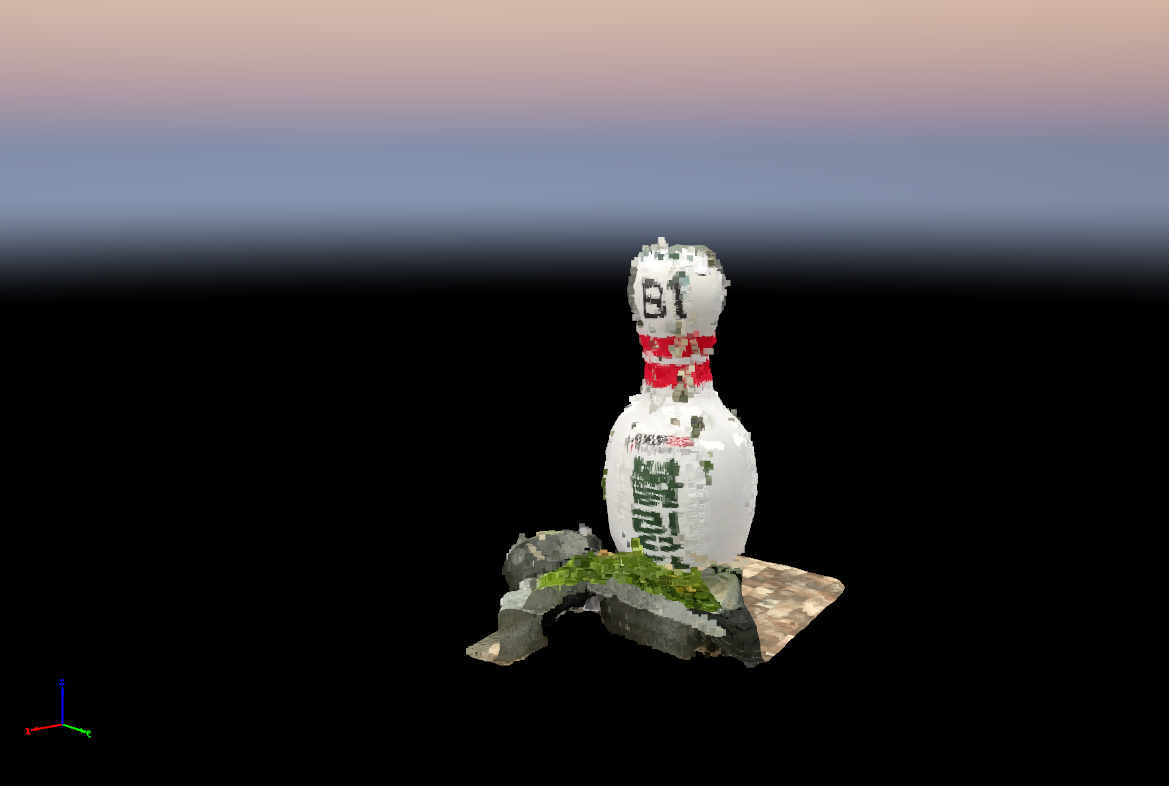
위의 사진과 같이 모델링이 생성 되었고, 데이터의 품질은 생각보다 좋지 않게 나왔습니다. 원인은 조형물 주변의 지형 자체가 조형물 주변을 움직이면서 촬영하기가 힘들게 되어 있어서, 사진의 키포인트매칭이 잘 되지 않았고, 촬영된 사진의 수 또한 적어서 모델링의 생성이 잘 되지 않은것으로 판단되었습니다.
프로젝트 디테일
| 담당자 | (주)헬셀 |
|---|
| 위치 | 현대지식산업센터 |
|---|
| 소프트웨어 | Pix4D catch, Pix4D mapper |
|---|
| 하드웨어 | Vidoc, iPad pro |
|---|
| 컴퓨터 사양 | Windows 10 Pro 64 bit, Intel(R) Core(TM) i7-9750H CPU @ 2.60GHz 2.59GHz, 64GB RAM, NVIDIA GeForce RTX 2060 |
|---|
| 촬영된 사진 수 | 130 |
|---|
| 처리 시간 | 1h 이내 |
|---|
Project 2

위의 결과에 따라 우리는 좀더 촬영이 용이한 조형물을 찾았습니다. 다음 테스트는 주택가 내 놀이터에 있는 미끄럼틀을 촬영하여 모델링을 시도해보기로 하였습니다.
Pix4D catch에는 촬영 옵션에 대해 2가지의 옵션이 있습니다. 첫번째는 이동 시 트리거 옵션으로, 촬영자가 #m만큼 움직일때 마다 트리거가 터지는 설정입니다. 두번째는 중복도를 설정하여 설정된 중복도에 맞춰서 트리거가 터지는 설정입니다. 두번째 테스트에서는 이 두가지 설정으로 미끄럼틀에 대한 촬영을 진행하여, 모델링을 시도하였습니다.
 이동시 트리거 | 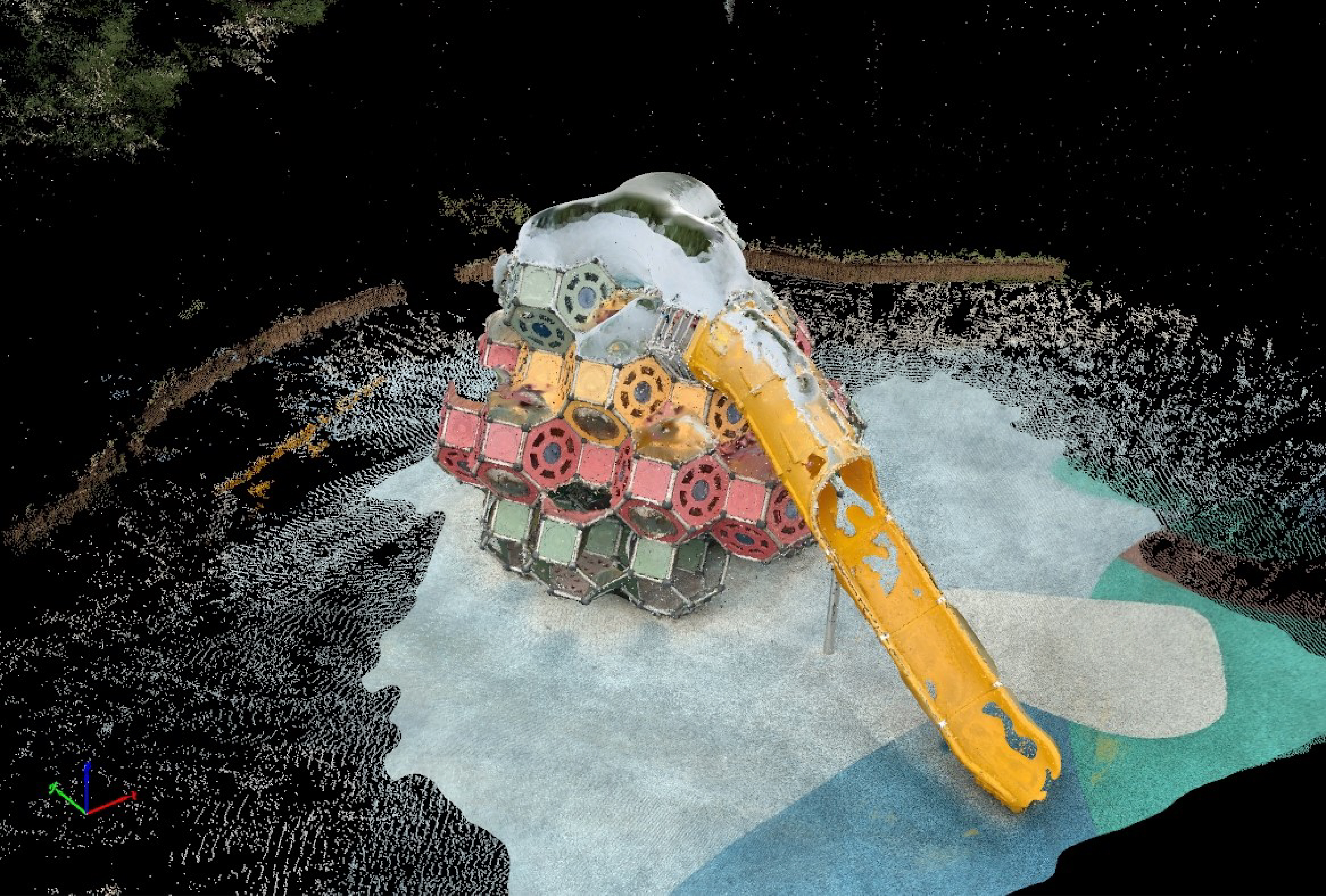 중복도 90% |
이전 테스트의 결과에 따라 이번 촬영은 700장 정도의 사진을 촬영 한 후 모델링을 진행하였습니다. 데이터 확인 결과 사진의 장수가 많아질 수록 모델링의 데이터 품질이 좋아지는 것으로 확인 되었고, 이동 시 트리거 옵션보다는 중복도 90%의 옵션으로 촬영을 하는게 더 좋은 모델링 데이터가 나오는 것으로 확인되었습니다.
프로젝트 디테일
| 담당자 | (주)헬셀 |
|---|
| 위치 | 현대지식산업센터 |
|---|
| 소프트웨어 | Pix4D catch, Pix4D mapper |
|---|
| 하드웨어 | Vidoc, iPad pro |
|---|
| 컴퓨터 사양 | Windows 10 Pro 64 bit, Intel(R) Core(TM) i7-9750H CPU @ 2.60GHz 2.59GHz, 64GB RAM, NVIDIA GeForce RTX 2060 |
|---|
| 촬영된 사진 수 | 이동시 트리거: 700
중복도 90%: 702 |
|---|
| 처리 시간 | 1h 이내 |
|---|
Project 3

다음으로 우리는 배수관공사를 하는 현장으로 가서 촬영을 하려고 했지만 주변에 마땅한 지역이 없었습니다. 따라서 우리는 건물을 건설하고 있는 현장으로 가서 공사현장 주변의 지형과, 공원에 있는 배수로지형을 촬영해서 모델링을 진행하였습니다.
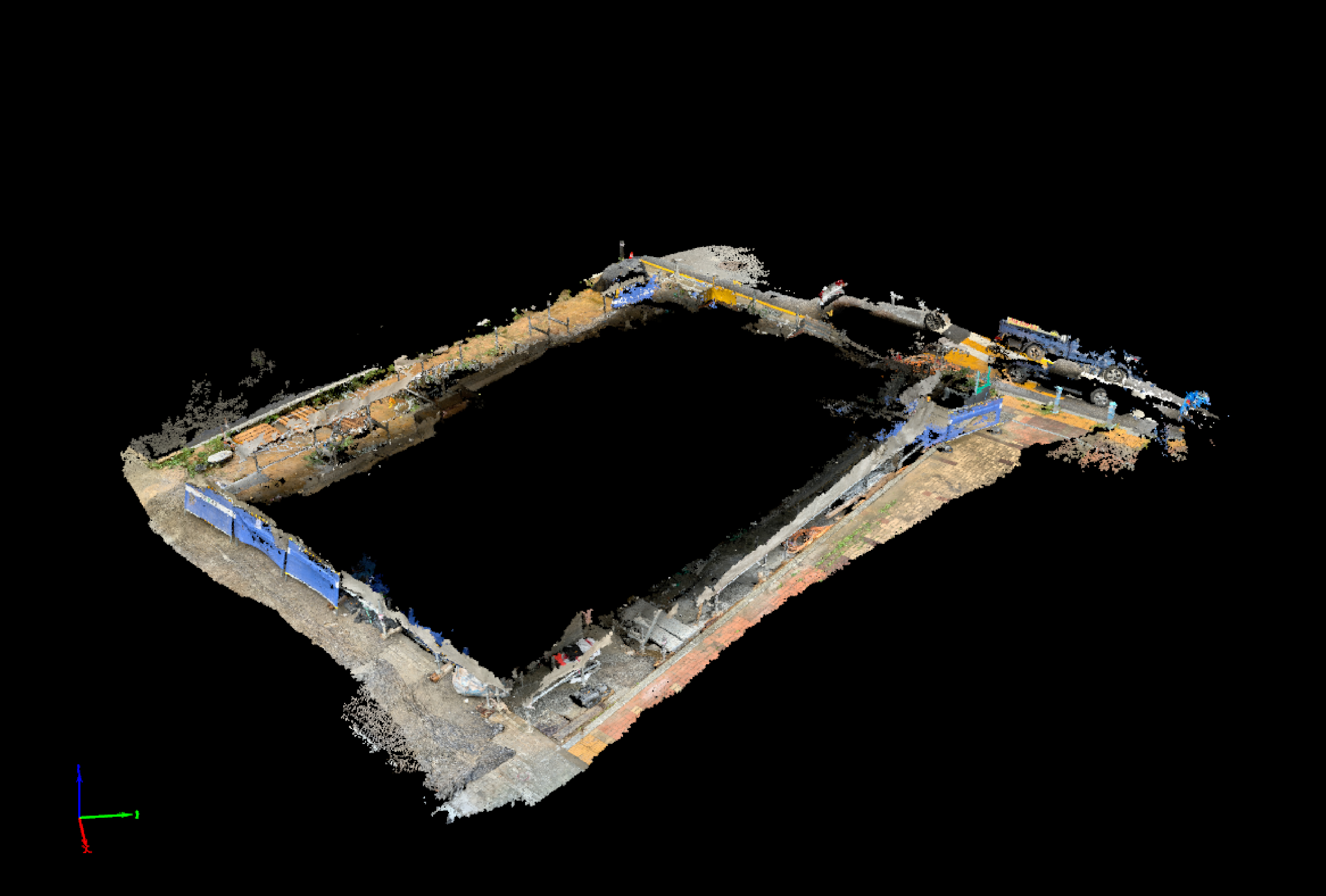 주택가 내 건설 현장 | 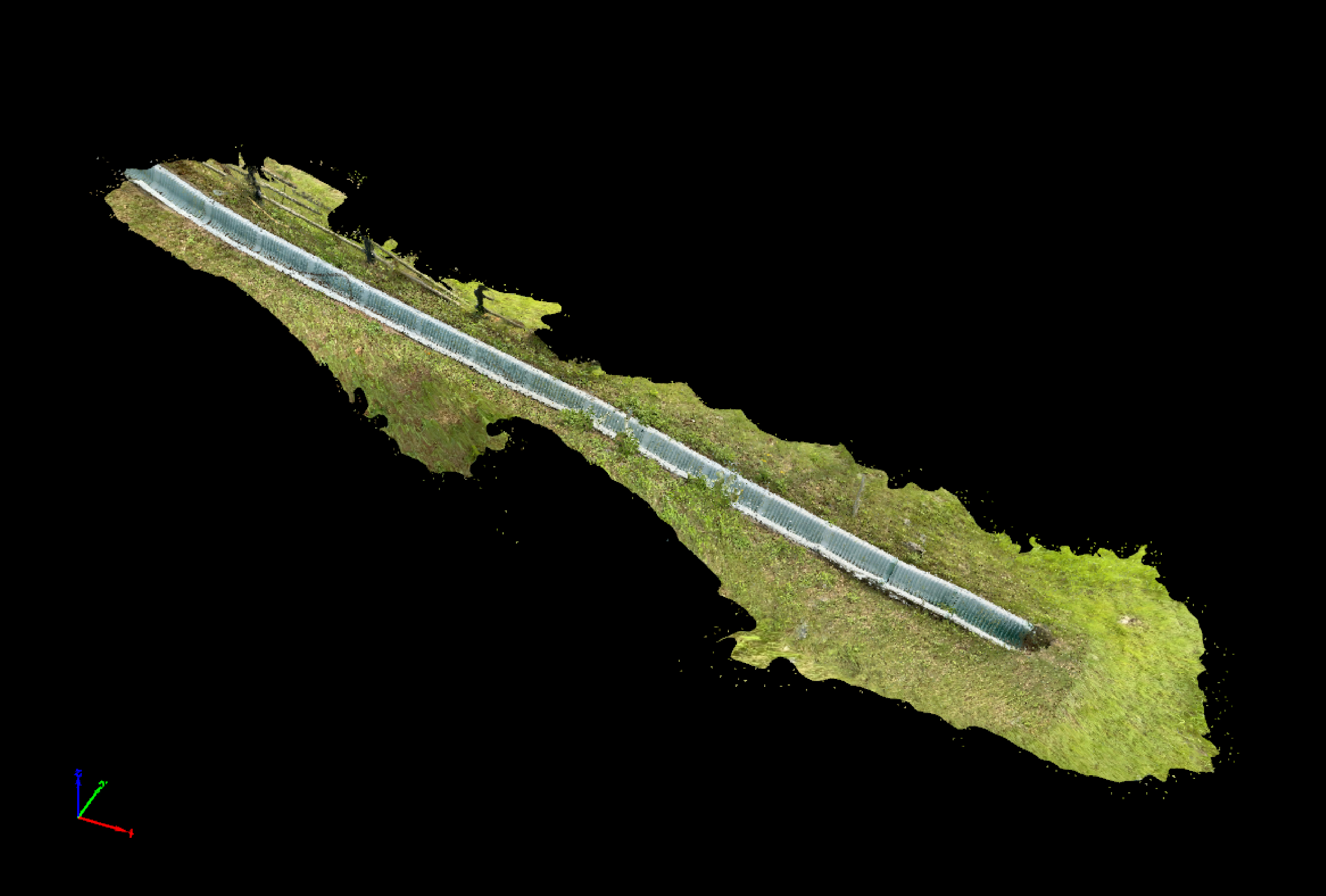 공원 배수로 |
처리 결과 데이터의 품질은 매우 좋게 나왔으며, 주변의 지형에 대한 인식도 잘 되어서, 건설현장 주변의 땅이 파인곳이나, 공원 배수로의 물길이 나있는 지형도 잘 표현이 되는것으로 확인이 되었습니다.
프로젝트 디테일
| 담당자 | (주)헬셀 |
|---|
| 위치 | 현대지식산업센터 |
|---|
| 소프트웨어 | Pix4D catch, Pix4D mapper |
|---|
| 하드웨어 | Vidoc, iPad pro |
|---|
| 컴퓨터 사양 | Windows 10 Pro 64 bit, Intel(R) Core(TM) i7-9750H CPU @ 2.60GHz 2.59GHz, 64GB RAM, NVIDIA GeForce RTX 2060 |
|---|
| 촬영된 사진 수 | 주택가 내 건설 현장: 513
공원 배수로: 894 |
|---|
| 처리 시간 | 1h 이내 |
|---|
결론
Vidoc의 RTK 신호는 이상 없는것으로 판단됩니다.조형물 모델링에서 Pix4D catch의 특성상 촬영자의 키 이상으로는 촬영이 어렵기 때문에 높이가 있는 조형물에 대해서는 모델링을 하기가 힘들지만, 촬영이 가능한 정면 및 바닥면은 모델링시 데이터의 품질이 매우 좋게 나왔습니다. 이는 드론으로 촬영이 불가한 낮은 고도에 대한 데이터를 Pix4Dcatch로 얻을 수 있다는 좋은 자료가 됩니다.
다음 테스트로는 Vidoc RTK를 이용하여, 일반 GPS로 촬영한 데이터와 RTK로 촬영한 데이터의 위치 오차값을 비교하는 테스트를 진행할 예정입니다.






















회원에게만 댓글 작성 권한이 있습니다.