안녕하세요 헬셀입니다.
얼마전 팬텀4 RTK가 정식으로 출시 되었습니다!
많은 분들이 궁금해 하셨던 제품인 만큼 헬셀에서 테스트를 해보지 않을 수가 없었습니다.
팬텀4 RTK는 영상촬영의 목적보다 산업용으로써 그 진가를 발휘할 수가 있습니다.
이번 테스트 리포트를 보시고 RTK의 참맛을 같이 한번 느껴보도록 합시다!
일 시 : 18년 10월 19일
금요일
장 소 : 구리한강공원
테스트 면적 : 700m X 150m (105,000㎡)
비교 테스트
기체 : 팬텀4RTK , 팬텀4PRO
테스트 고도 : 150m
중복도 : 종 85%, 횡 85%
1. 개요
팬텀4 RTK 출시로 인한 위치적 정밀도 테스트를 진행했다.
비교군은 같은 2000만 화소 카메라를 가지고 있는 팬텀4PRO로 진행했고, 테스트 높이는 150m로 진행하였다.
2. 위치
촬영장소는 한강수계에
있는 구리 한강공원으로 했고, 촬영은 종방향 700m 횡방향 150m로 강변북로부터 수면까지 진행했다.

3. 기준점 (Ground Control
Point) 의 설치
같은 고도에서 같은면적을
촬영 하는 것을 기본으로 했고, Ground Control Point (기준점)는 11점을 설치했고,
트림블사의
보드를 사용하는 정밀 GNSS 장비인 Hi-Target V90을
사용했다.
기준점 (이하 GCP)의 측정은 국토지리정보원 상시 기지국 서버를 이용하는
VRS (가상기지국) 방식을 사용했고 구성되는 기준망은 다음과
같다.
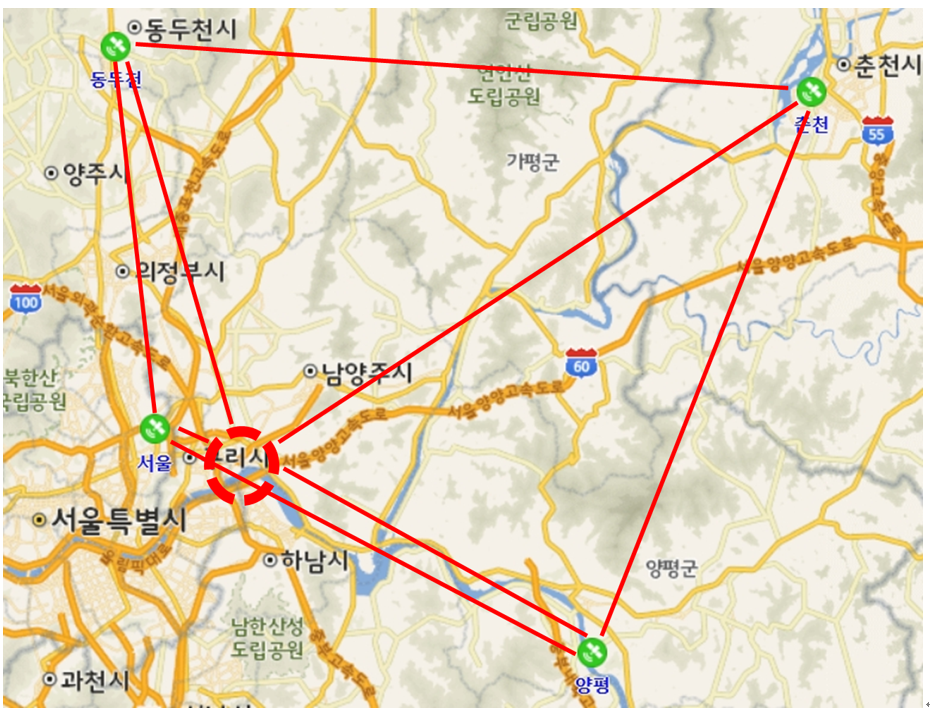
작업지역인 구리시에서
가까운 4개의 상시기준국 관측소인 서울, 양평, 춘천, 동두천시에 있는 위성관측소에서 기준망을 구성해서,
제일 가까운 서울 관측소에서 보정치를 날려주는 방식으로 운용하였다.
기준점의 측정은 캘리브레이션
망을 별도로 구성하지는 않았으며, GRS80 127N 중부 좌표계를 사용하였고,
지오이드는 KNGeoid14를 사용하고 별도의 레벨작업은 편의상
진행하지 않았다.
4.
촬영방법 과 RTK 모듈의 사용
촬영은 자동항법 프로그램을 사용하였고,각각 13분 정도의 시간이 소요되었고, 사진은 약 97장의 데이터가 촬영되었다.
팬텀4RTK의 경우 Base 모듈이
아직 없는 관계상 ( 11월 ~12월 입고 예정) NTrip 방식을 이용해서 기준점 측정시와 같은 국토지리정보원 VRS망을
이용하였다.
5.
팬텀4 RTK 와 팬텀4 프로의 결과 비교
테스트 결과는 Pix4D Mapper 프로그램을 사용 3D 맵핑을 진행하고, 나온 결과를 비교 분석하는 방법을 사용하였고, GCP를 적용했을 경우와 비 적용했을 경우,
그리고 GCP를 양쪽 끝에서만 적용했을 경우를 테스트했다.
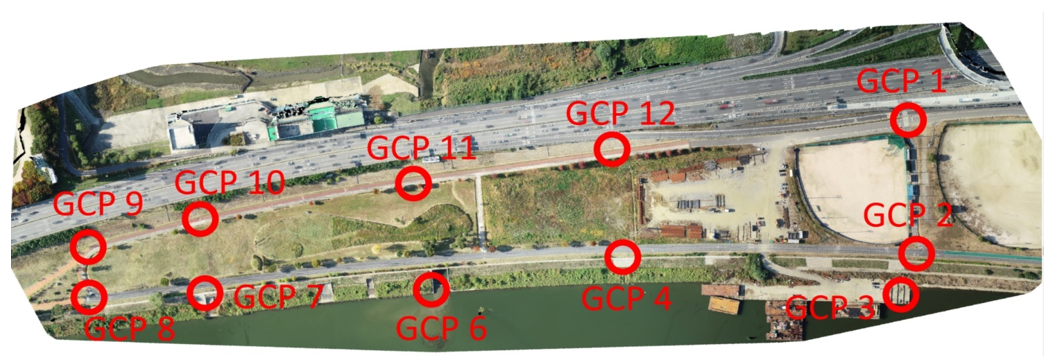
<
작업범위와 GCP의 설치 위치 >
1)
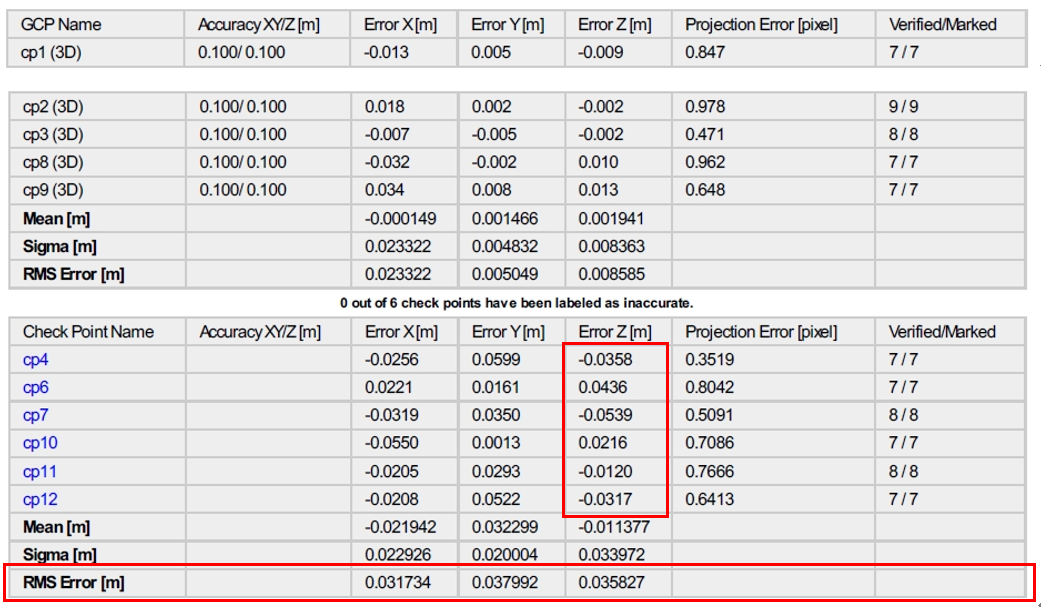
 GCP를 모두 적용했을 경우
GCP를 모두 적용했을 경우
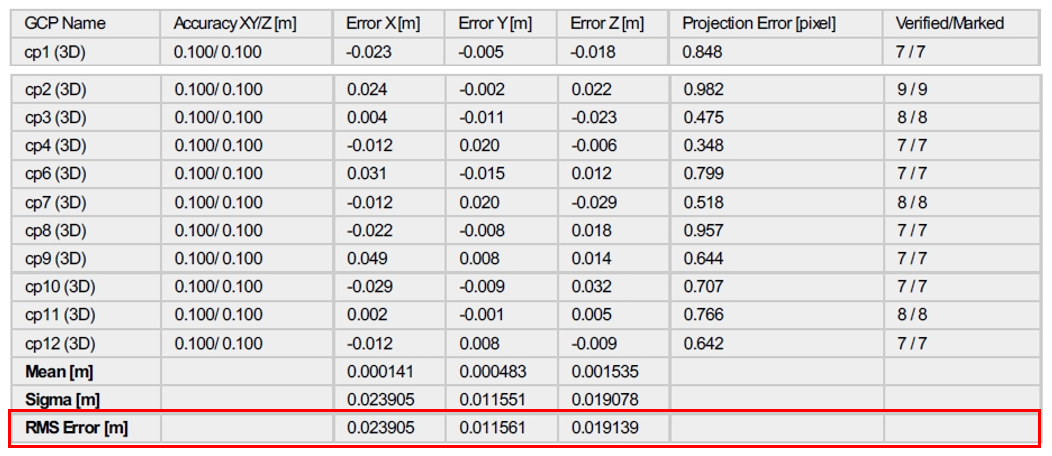
< 팬텀4 RTK
GCP >
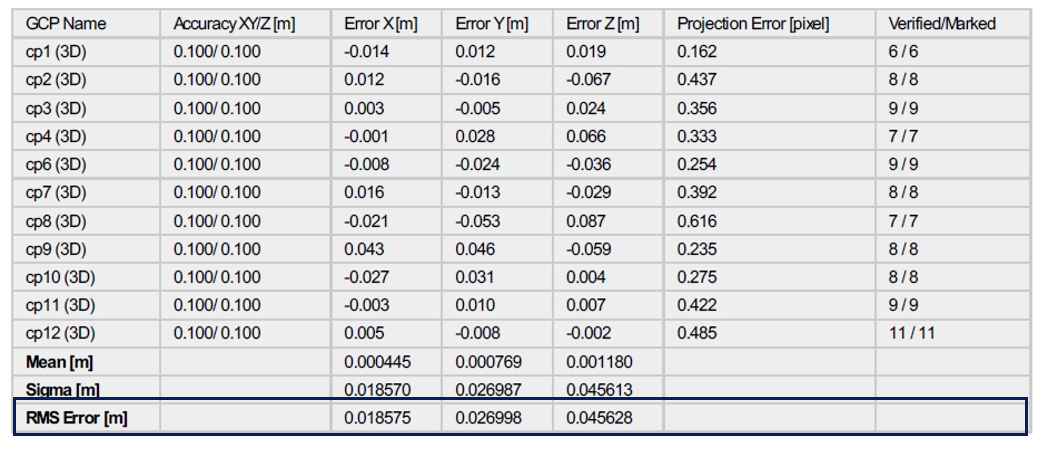
< 팬텀4 Pro GCP >
GCP를 모두 적용한 경우 실질적 기준점 사이의 X, Y, Z의 오차는 RTK의 경우 0.023, 0.012, 0.019 와 프로의 경우
0.019, 0.027,
0.046로 X, Y의 경우는 비슷한 결과를 보였고 Z값의
경우에도 2cm, 5cm의 양호한 오차를 보였다.
< 팬텀4 RTK
GCP 작업범위 가장자리만 포함 >
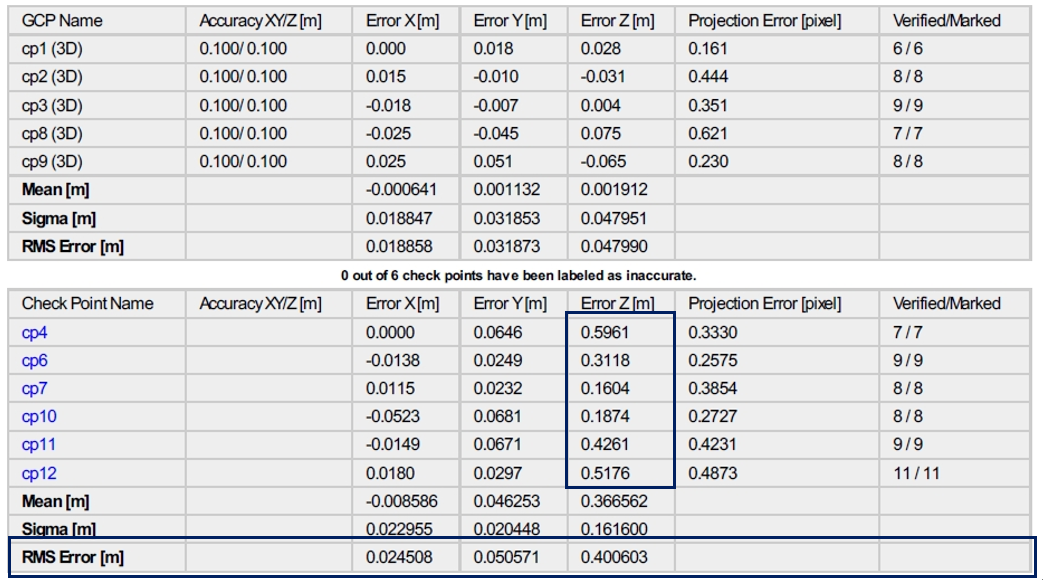
< 팬텀4 Pro GCP 작업범위 가장자리만 포함 >
프로세싱을 할 때 GCP를 작업범위 맨 끝을 기준으로 5점 ( 1, 2, 3, 8, 9 번) 만 적용 시켰다. 프로세싱에 사용된 기준점들 끼리의
거리는 약 700m 정도이고 중간에 기준점들은 체크포인트로 적용시켜서 오차를 비교해 보았다.
위의 표에서 볼 때 RTK모듈을 사용했을 경우 기준점 사이의 Z(높이) 의 오차가 4cm 안에
들어오는 정밀한 성과를 나타냈지만,
팬텀4프로의 경우 평균 40cm, 최대 50cm의 Z값의
오차를 보였다.
3)
GCP를 적용하지 않은 경우
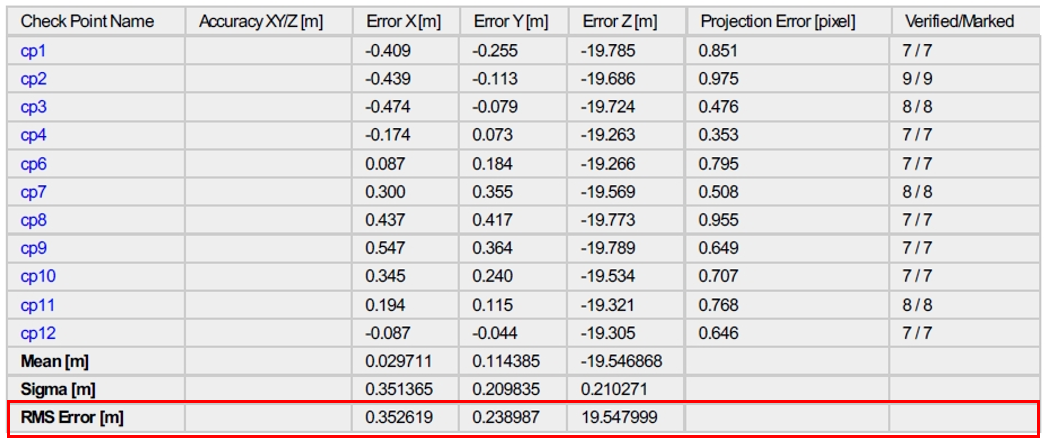
< 팬텀4 RTK
GCP NO GCP >
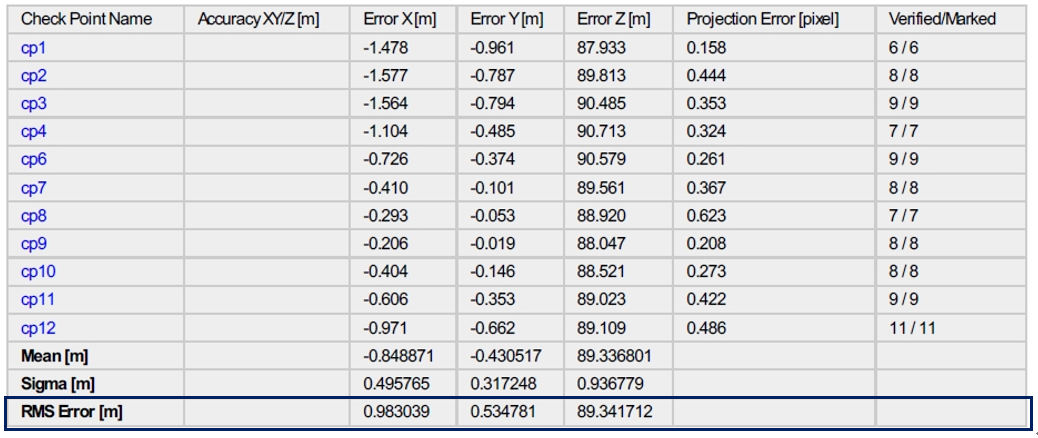
< 팬텀4 Pro GCP NO GCP >
GCP를 적용하지 않고 프로세싱을 한 결과 위치적 오차는 RTK의 경우
X, Y 가 각각 35cm, 24cm
팬텀4프로의 경우 98cm, 53cm의 오차를 보였다. 또한 Z의 경우에는 상대적인 오차를 비교해 보니 RTK의 경우 -25cm ~ 28cm 의 분포와
팬텀4의 경우 -141cm ~ 137cm 의 분포를 보였다.
6.
결론.
일반적으로 드론을 사용해서 촬영과 모델링을 할 경우 지상 기준점은 대략 200m
정도의 간격으로 설치를 해야 높이에 대한 정확한 보정이 이루어진다.
그렇기 떄문에 2km2의 면적을 측정할 경우 최소 100개 정도의 기준점을 설치
해야 함을 알 수가 있다.
이번에 팬텀4 RTK로 국토지리정보원의 VRS 서버로 접속해서 촬영을 진행하고
모델링을 한 결과 RTK모듈을 사용해서 촬영을 하고 3차원
모델링을 하면
약 600 ~ 700 미터 내에 GCP가 없더라도
Z (높이) 에 대한 보정이 된다고 볼 수 있기에 약 10 ~ 15개 정도의 기준점만 설치해도 높이에 대한 보정이
충분히 이루어 져서 정밀한 3차원 데이터를 얻을 수 있음을 알 수 있다.
국내에서의 지형은
평지보다는 고저차가 있는 지형과 산악지형이 많은 것을 알 수 있다.
이러한 지형에서 3차원 맵핑과 모델링을 해야 하는 경우 GCP를 설치하지 못하는 지형이
많이 생길 수 있다.
이런 경우에 있어서 RTK 모듈을 이용한
기체를 사용한다면 적은 수의 GCP로 3차원 모델링에 활용할
수 있다.
RTK모듈은 보다 정확한 위치 정보를 잡고 촬영을 진행하기 때문에 자동 항법 비행시에 촬영 노선과 노선 사이의
중복도 (특히 횡중복의 경우) 가 한쪽에 치우치거나 모자라는
현상을 줄여줄 수 있어 촬영과 정밀한 모델링에 도움이 된다.
또한 11월 중에 입고 예정인 RTK기지국인 D-RTK를 사용한다면 현재보다 더욱 정밀한 맵핑이 가능할 것으로 예상된다.
(11월중에 테스트 예정)






















회원에게만 댓글 작성 권한이 있습니다.